単方向リスト: 並行処理編 Part 2
ソースはGitHubに移行しました。
Lazy Synchronization Singly-linked List(Lazy同期 単方向リスト) pthread_mutex編
以下の論文で提案されたLazy同期リストを実装する。
S. Heller, M. Herlihy, V. Luchangco, M.Moir, W. N. Scherer III, N. Shavit, "A Lazy Concurrent List-Based Set Algorithm", Proc. of the Ninth International Conference on Principles of Distributed Systems, Pisa, Italy, pp.3-16, 2005"A Lazy Concurrent List-Based Set Algorithm"
基本戦略は細粒度単方向リストの改良で、リストの走査はノードをロックせず"楽観的(Optimistic)"に"怠惰(Lazy)"に行い、
見つかったノードだけロックして走査(add/delete)する。
簡単に図示すると以下のようになる:
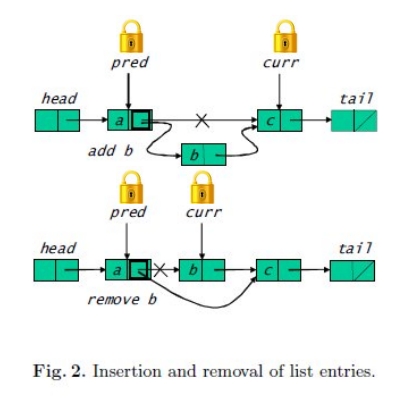
ただし、ロックをかけるタイミングによっては削除するノードの次に新ノードを追加してしまう可能性もあるので、 削除するノードにマーキングして"論理的に削除"し、追加と削除を並行実行しても不都合が起きないようにしている。
論文は擬似Javaで記述されているので、Cで再実装した。
ソースはGitHubに移行しました。
データ構造
データ構造list_tとnode_tを定義する。 list_tはListの本体、node_tはListに連結するnodeのデータ構造である。
nodeとlistのデータ構造を示す。
LazySynchroList.h:
typedef struct _node_t
{
lkey_t key; /* key */
val_t val; /* 値 */
bool_t marked; /* 論理的に削除されたか否かのmark */
pthread_mutex_t mtx; /* node毎のlock */
struct _node_t *next; /* 次のnodeへのポインタ */
} node_t;
typedef struct _list_t
{
node_t *head;
node_t *tail;
} list_t;
node_tは(key,val)のペアと次のnodeへのポインタ、およびpthreadのmutex変数を保持する。 また、論理的な削除を示すbool値markedも保持する。初期値はfalseで"削除されていない"を示す。
list_tには、リストの先頭headと末尾tailが確保される。
基本関数
listの生成
/*
* list_t *init_list(void)
*
* listを生成する。
*
* 成功すればlistへのポインタを返す。失敗ならNULLを返す。
*
*/
list_t *init_list(void)
{
list_t *list;
if ((list = (list_t *) calloc(1, sizeof(list_t))) == NULL) {
elog("calloc error");
return NULL;
}
if ((list->head = (node_t *) calloc(1, sizeof(node_t))) == NULL) {
elog("calloc error");
free (list);
goto end;
}
list->head->mtx = (pthread_mutex_t) PTHREAD_MUTEX_INITIALIZER;
if ((list->tail = (node_t *) calloc(1, sizeof(node_t))) == NULL) {
elog("calloc error");
goto end;
}
list->tail->mtx = (pthread_mutex_t) PTHREAD_MUTEX_INITIALIZER;
list->head->next = list->tail;
list->tail->next = NULL;
return list;
end :
free (list->head);
free (list);
return NULL;
}
ノードの追加
ノードの追加を行う関数add()を示す。
基本戦略はノードの走査は「楽観的に」ロックをかけずに行い、
目的のノード(追加手前のノードpredとその次のノードsucc)を見つけた後にロックする。
それから新しいノードnewNodeをpredとsuccの間に追加する。
なお、マクロ validateはdelete()のアルゴリズムを見ると理解しやすいので
ここでは詳細を省き、「削除対象でないことを保証するマクロ」とだけ記す。
/*
* bool_t add(list_t * list, const lkey_t key, const val_t val)
*
* listにnode(key,val)を追加する。
* 追加位置はkeyの昇順に従う。すでに同じkeyを持つnodeがある場合は失敗。
*
* 成功すればtrue、失敗すればfalseを返す。
*/
#define validate(pred, curr) (!pred->marked && !curr->marked && pred->next == curr)
bool_t add(list_t * l, const lkey_t key, const val_t val)
{
node_t *pred, *curr;
node_t *newNode;
bool_t ret = true;
if ((newNode = create_node(key, val)) == NULL)
return false;
while (1) {
pred = l->head;
curr = pred->next;
/* 目的のノードまで走査 */
while (curr->key < key && curr != l->tail) {
pred = curr;
curr = pred->next;
}
/*
* この間に、他のスレッドがpredやcurrを削除、変更、または
* ノードを追加する可能性がある
*/
if (lock(&pred->mtx) != 0) { /* lockが成功しなければ、最初からやりなおし */
continue;
} else if (lock(&curr->mtx) != 0) {
unlock(&pred->mtx);
continue;
}
/* この時点で成立する条件式: (pred->key) < (newNode->key) <= (curr->key) */
assert ((pred->key < key) && (key <= curr->key));
/* クリティカルセクション開始 */
if (validate(pred, curr)) {
if (key == curr->key) {
ret = false;
free_node(newNode);
} else {
newNode->next = curr;
pred->next = newNode;
}
/* クリティカルセクション終了 */
unlock(&pred->mtx); unlock(&curr->mtx);
break;
}
unlock(&pred->mtx); unlock(&curr->mtx);
}
return ret;
}
関数add()内部で呼ぶnode生成関数create_node()を示す。
/*
* node_t *create_node(const lkey_t key, const val_t val)
*
* (key, val)を持つnodeを生成する。
*
* 成功すればnodeへのポインタを返す。失敗すればNULLを返す。
*/
static node_t *create_node(const lkey_t key, const val_t val)
{
node_t *node;
if ((node = calloc(1, sizeof(node_t))) == NULL) {
elog("calloc error");
return NULL;
}
node->mtx = (pthread_mutex_t) PTHREAD_MUTEX_INITIALIZER;
node->key = key;
node->val = val;
return node;
}
ノードの削除
ノードの削除も基本戦略は追加と同じである。よって実装にも上と同じ問題を抱えている。
ノードの属性:markedは、ロックした後にfalseからtrueに変更される。これにより論理的に削除されたことになる。
次に実際にfreeでメモリ領域が開放され物理的にも削除される。
/*
* bool_t delete(list_t * list, const lkey_t key, val_t *val)
*
* listからkeyを持つnodeを削除し、そのnodeのvalを*valに書き込む。
* keyが存在しない場合は失敗。
*
* 成功すればtrue、失敗すればfalseを返す。
*/
#define validate(pred, curr) (!pred->marked && !curr->marked && pred->next == curr)
bool_t delete(list_t * l, const lkey_t key, val_t *val)
{
node_t *pred, *curr;
bool_t ret = true;
while(1) {
pred = l->head;
curr = pred->next;
if (curr == l->tail) {
ret = false;
break;
} else {
/* 目的のノードまで走査 */
while (curr->key < key && curr != l->tail) {
pred = curr;
curr = pred->next;
}
/*
* この間に、他のスレッドがpredやcurrを削除、変更、または
* ノードを追加する可能性がある
*/
if (lock(&pred->mtx) != 0) { /* lockが成功しなければ、最初からやりなおし */
continue;
} else if (lock(&curr->mtx) != 0) {
unlock(&pred->mtx);
continue;
}
/* この時点で成立する条件式: (pred->key) < (newNode->key) <= (curr->key) */
assert ((pred->key < key) && (key <= curr->key));
/* クリティカルセクション開始 */
if (validate(pred, curr)) {
if (key == curr->key) {
curr->marked = true;
*val = curr->val;
pred->next = curr->next;
free_node(curr);
} else {
ret = false;
}
/* クリティカルセクション終了 */
unlock(&pred->mtx); unlock(&curr->mtx);
break;
}
unlock(&pred->mtx); unlock(&curr->mtx);
}
}
return ret;
}
ノードの検索
/*
* bool_t find(list_t * list, const lkey_t key, val_t *val)
*
* listからkeyを持つnodeを検索し、そのnodeのvalを*valに書き込む。
* keyが存在しない場合は失敗。
*
* 成功すればtrue、失敗すればfalseを返す。
*/
bool_t find(const list_t * list, const lkey_t key)
{
node_t *curr;
curr = list->head;
while (curr->key < key) {
curr = curr->next;
}
return (curr->key == key && !curr->marked);
}
実行
ソースはGitHubに移行しました。